
When you first connect a diagnostic tool to a Saab 9-3 NG and turn the key, you quickly realize the car is a collection of modules talking constantly. The term GMLAN (GM LAN) refers to a vehicle communication architecture based on a family of buses. On the GM side, it relies on the CAN protocol and features links at different speeds depending on the usage.
Three Networks to Understand on the 9-3 NG
Saab documentation provides a very clear breakdown:
P-bus (Powertrain)
A high-speed bus (500 kbps) dedicated to the powertrain and safety systems. This is where the engine talks to the ABS/ESP for stability control functions.
I-bus (Instrumentation)
A lower-speed bus (33 kbps) for cabin comfort, instrumentation, and body electronics.
O-bus (Optical bus)
An optical ring network, mainly for audio and infotainment. It is described as a "closed-loop" fiber network with a transmission speed around 25 Mbit/s.
The CIM: Gateway and Intelligent Firewall
In this architecture, the CIM acts as a gateway between the P-bus and I-bus: it transfers information from one network to the other. Beyond being a simple bridge, it acts as an intelligent firewall, filtering and translating priorities between the high-speed bus (500k) and the low-speed bus (33k). This is why a "column/CIM" failure can cause such varied symptoms—it's not just a part; it's a critical transit point.
Functional vs Physical: Understanding Addressing
On a vehicle bus, we distinguish between two interrogation methods:
- Functional ID (0x101): Used for global wake-up and requests addressed to all modules simultaneously. Using the FE extension byte allows for efficient broadcast summation to identify all nodes on the bus.
- Physical Arbitration IDs: Unique identifiers for each module for targeted diagnostics (e.g., 0x245 for the CIM).
Note the significant exception of the ECM (Bosch PSG16) which uses offset IDs (0x7E0 / 0x7E8), a remnant of its specific architecture inherited from Bosch engine engineering.
Diagnostics and Session Maintenance
To keep a diagnostic session open and prevent modules from reverting to normal mode, the tool periodically sends the Tester Present (3E) service. This "heartbeat" is essential during data reading or programming phases. For massive data flows, such as reading fault codes, the system switches to 5XX IDs (DTCs), distinct from standard 6XX response IDs.
ISO-TP (ISO 15765-2): Transporting Long Messages
A standard CAN frame has a limited payload of 8 bytes. To transport longer data (VIN, ECU IDs, EEPROM reads), we use the ISO-TP layer.
The receiver paces the sender via the Flow Control (30 00 00) mechanism. This priority rule prevents ECU buffer saturation by forcing the sender to wait for authorization before sending Consecutive Frames.
Bit Stuffing and Physical Synchronization
The CAN protocol uses a synchronization mechanism that requires a complementary bit (stuff bit) to be inserted after five identical consecutive bits. In Saab engineering, this is often linked to 0x55 padding (alternating 0101). This physical trick guarantees maximum transitions on the bus, ensuring perfect clock synchronization for controllers on very long messages.
"Understanding the bus is learning to read a complete system logic, far beyond just collecting fault codes."
Preview: The Future of Independent Diagnostics
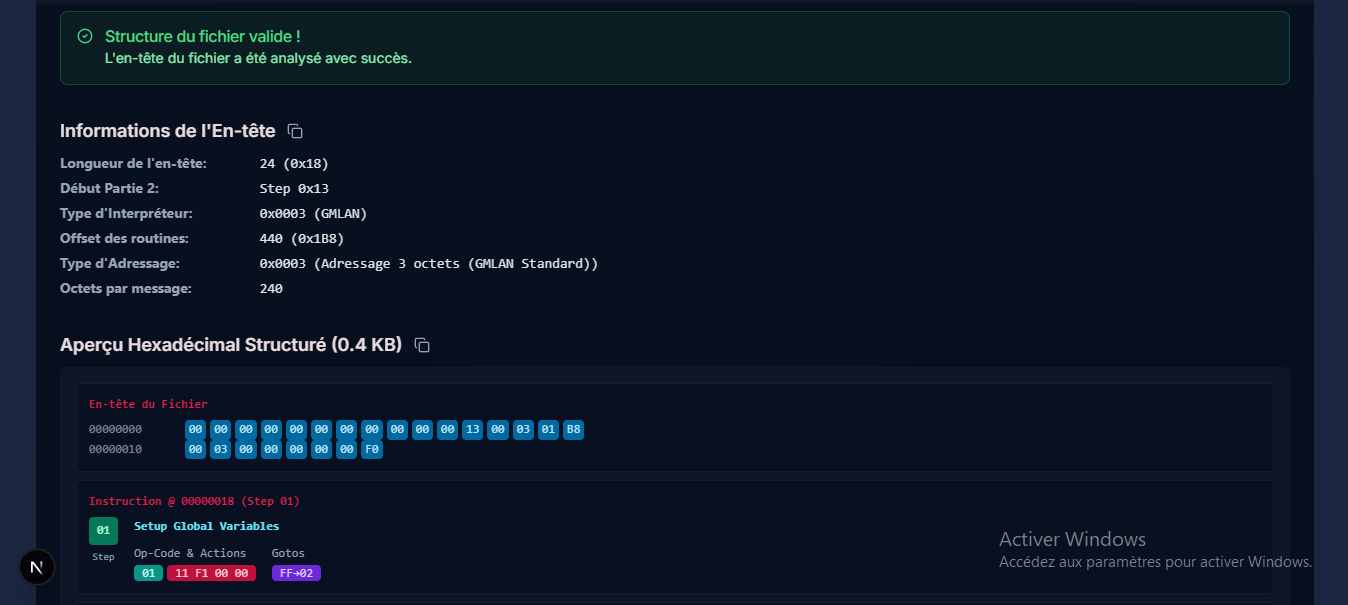
Here is a glimpse of the tools under development, enabling granular analysis of binary files and GMLAN frames. This interface decodes header structures and addressing routines to automate future workshop tools.
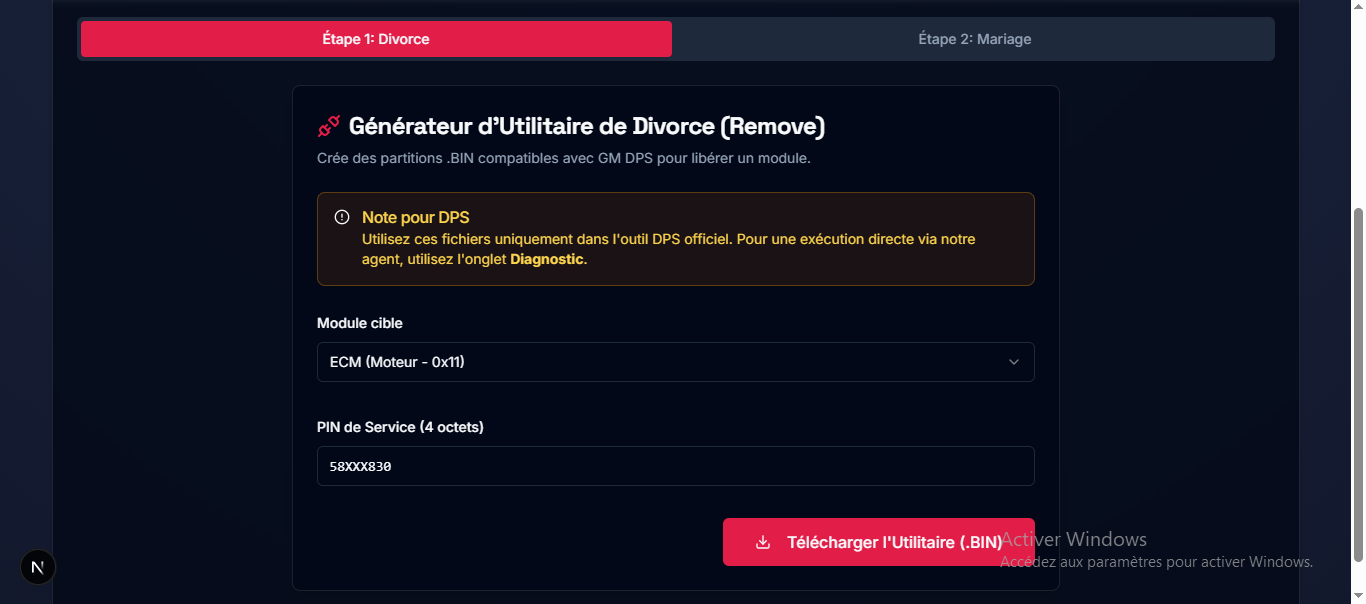
Interface for generating specific binary utility files (.bin), dedicated to maintenance operations such as module marriage or divorce, for use with GM DPS.
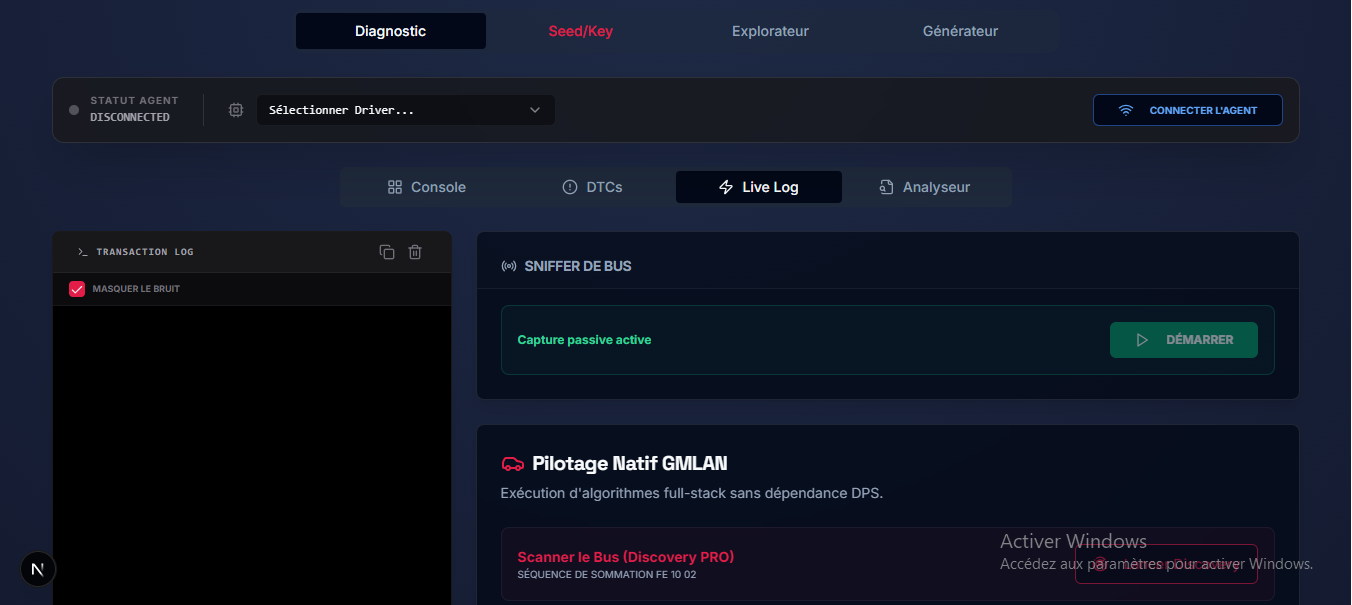
Real-time diagnostic interface communicating directly with the vehicle via a custom PassThru agent, allowing for enriched data reading and routine tests.
Mastering this technical 'jargon' is the key that allowed me to transform a simple interface into a true Swiss Army knife for our Saabs. It is thanks to this architecture that I am beginning to develop functions once reserved for official workshops: the immediate marriage of a used PSG16 engine ECU, the divorce of a CIM or an ICM3 screen, and even enriched fault code reading with WIS test procedures. By understanding how the car communicates, I am convinced that it is possible to build a serious alternative to original tools that are becoming increasingly inaccessible.
References and technical validation:
- GMLAN = GM architecture based on CAN (GM TechLink publication).
- P-bus 500 kbps / I-bus 33 kbps + CIM gateway (WIS).
- O-bus: optical ring, audio usage, 25 Mbit/s (Saab doc + WIS).
- ISO-TP: Flow Control (30 00 00) and addressing (ISO 15765-2).
- Saab Arbitration IDs: 0x101 (Functional), 0x7E0 (PSG16 ECM).

